|
|||||||||||||||
Customisation
FreeRTOS is customised using a configuration file called FreeRTOSConfig.h. Every
FreeRTOS application must have a FreeRTOSConfig.h header file in its pre-processor
include path. FreeRTOSConfig.h tailors the RTOS kernel to the application being
built. It is therefore specific to the application, not the RTOS, and should be
located in an application directory, not in one of the RTOS kernel source code
directories.
|
|||||||||||||||



/* configSUPPORT_STATIC_ALLOCATION is set to 1, so the application must provide an implementation of vApplicationGetIdleTaskMemory() to provide the memory that is used by the Idle task. */ void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize ) { /* If the buffers to be provided to the Idle task are declared inside this function then they must be declared static - otherwise they will be allocated on the stack and so not exists after this function exits. */ static StaticTask_t xIdleTaskTCB; static StackType_t uxIdleTaskStack[ configMINIMAL_STACK_SIZE ]; /* Pass out a pointer to the StaticTask_t structure in which the Idle task's state will be stored. */ *ppxIdleTaskTCBBuffer = &xIdleTaskTCB; /* Pass out the array that will be used as the Idle task's stack. */ *ppxIdleTaskStackBuffer = uxIdleTaskStack; /* Pass out the size of the array pointed to by *ppxIdleTaskStackBuffer. Note that, as the array is necessarily of type StackType_t, configMINIMAL_STACK_SIZE is specified in words, not bytes. */ *pulIdleTaskStackSize = configMINIMAL_STACK_SIZE; } /*-----------------------------------------------------------*/ /* configSUPPORT_STATIC_ALLOCATION and configUSE_TIMERS are both set to 1, so the application must provide an implementation of vApplicationGetTimerTaskMemory() to provide the memory that is used by the Timer service task. */ void vApplicationGetTimerTaskMemory( StaticTask_t **ppxTimerTaskTCBBuffer, StackType_t **ppxTimerTaskStackBuffer, uint32_t *pulTimerTaskStackSize ) { /* If the buffers to be provided to the Timer task are declared inside this function then they must be declared static - otherwise they will be allocated on the stack and so not exists after this function exits. */ static StaticTask_t xTimerTaskTCB; static StackType_t uxTimerTaskStack[ configTIMER_TASK_STACK_DEPTH ]; /* Pass out a pointer to the StaticTask_t structure in which the Timer task's state will be stored. */ *ppxTimerTaskTCBBuffer = &xTimerTaskTCB; /* Pass out the array that will be used as the Timer task's stack. */ *ppxTimerTaskStackBuffer = uxTimerTaskStack; /* Pass out the size of the array pointed to by *ppxTimerTaskStackBuffer. Note that, as the array is necessarily of type StackType_t, configTIMER_TASK_STACK_DEPTH is specified in words, not bytes. */ *pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH; }
Examples of the callback functions that must be provided by the application to
supply the RAM used by the Idle and Timer Service tasks if configSUPPORT_STATIC_ALLOCATION is set to 1. |
See the Static Vs Dynamic Memory Allocation
page for more information.
configSUPPORT_DYNAMIC_ALLOCATION
If configSUPPORT_DYNAMIC_ALLOCATION is set to 1 then RTOS objects can be created using RAM that is automatically allocated from the FreeRTOS heap.If configSUPPORT_DYNAMIC_ALLOCATION is set to 0 then RTOS objects can only be created using RAM provided by the application writer.
If configSUPPORT_DYNAMIC_ALLOCATION is left undefined it will default to 1.
See the Static Vs Dynamic Memory Allocation page for more information.
configTOTAL_HEAP_SIZE
The total amount of RAM available in the FreeRTOS heap.This value will only be used if configSUPPORT_DYNAMIC_ALLOCATION is set to 1 and the application makes use of one of the sample memory allocation schemes provided in the FreeRTOS source code download. See the memory configuration section for further details.
configAPPLICATION_ALLOCATED_HEAP
By default the FreeRTOS heap is declared by FreeRTOS and placed in memory by the linker. Setting configAPPLICATION_ALLOCATED_HEAP to 1 allows the heap to instead be declared by the application writer, which allows the application writer to place the heap wherever they like in memory.If heap_1.c, heap_2.c or heap_4.c is used, and configAPPLICATION_ALLOCATED_HEAP is set to 1, then the application writer must provide a uint8_t array with the exact name and dimension as shown below. The array will be used as the FreeRTOS heap. How the array is placed at a specific memory location is dependent on the compiler being used - refer to your compiler's documentation.
uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
configGENERATE_RUN_TIME_STATS
The Run Time Stats page describes the use of this parameter.
configUSE_CO_ROUTINES
Set to 1 to include co-routine functionality in the build, or 0 to omit co-routine functionality from the build. To include co-routines croutine.c must be included in the project.
configMAX_CO_ROUTINE_PRIORITIES
The number of priorities available to the application co-routines. Any number of co-routines can share the same priority. Tasks are prioritised separately - see configMAX_PRIORITIES.
configUSE_TIMERS
Set to 1 to include software timer functionality, or 0 to omit software timer functionality. See the FreeRTOS software timers page for a full description.
configTIMER_TASK_PRIORITY
Sets the priority of the software timer service/daemon task. See the FreeRTOS software timers page for a full description.
configTIMER_QUEUE_LENGTH
Sets the length of the software timer command queue. See the FreeRTOS software timers page for a full description.
configTIMER_TASK_STACK_DEPTH
Sets the stack depth allocated to the software timer service/daemon task. See the FreeRTOS software timers page for a full description.
configKERNEL_INTERRUPT_PRIORITY
Ports that contain a configKERNEL_INTERRUPT_PRIORITY setting include ARM Cortex-M3, PIC24, dsPIC, PIC32, SuperH and RX600.
Ports that contain a configMAX_SYSCALL_INTERRUPT_PRIORITY setting include PIC32, RX600, ARM Cortex-A and ARM Cortex-M ports.
configMAX_SYSCALL_INTERRUPT_PRIORITY and
configMAX_API_CALL_INTERRUPT_PRIORITY
ARM Cortex-M3 and ARM Cortex-M4 users please take heed of the special note at the end of this section!
configMAX_API_CALL_INTERRUPT_PRIORITY is a new name for configMAX_SYSCALL_INTERRUPT_PRIORITY that is used by newer ports only. The two are equivalent.
configKERNEL_INTERRUPT_PRIORITY should be set to the lowest priority.
Note in the following discussion that only API functions that end in "FromISR" can be called from within an interrupt service routine.
For ports that only implement configKERNEL_INTERRUPT_PRIORITY
configKERNEL_INTERRUPT_PRIORITY sets the interrupt priority used by the RTOS kernel itself. Interrupts that call API functions must also execute at this
priority. Interrupts that do not call API functions can execute at higher priorities and therefore never have their execution delayed by the RTOS kernel
activity (within the limits of the hardware itself).
For ports that implement both configKERNEL_INTERRUPT_PRIORITY and configMAX_SYSCALL_INTERRUPT_PRIORITY:
configKERNEL_INTERRUPT_PRIORITY sets the interrupt priority used by the RTOS kernel itself. configMAX_SYSCALL_INTERRUPT_PRIORITY sets the highest
interrupt priority from which interrupt safe FreeRTOS API functions can be called.
A full interrupt nesting model is achieved by setting configMAX_SYSCALL_INTERRUPT_PRIORITY above (that is, at a higher priority level) than configKERNEL_INTERRUPT_PRIORITY. This means the FreeRTOS kernel does not completely disable interrupts, even inside critical sections. Further, this is achieved without the disadvantages of a segmented kernel architecture. Note however, certain microcontroller architectures will (in hardware) disable interrupts when a new interrupt is accepted - meaning interrupts are unavoidably disabled for the short period between the hardware accepting the interrupt, and the FreeRTOS code re-enabling interrupts.
Interrupts that do not call API functions can execute at priorities above configMAX_SYSCALL_INTERRUPT_PRIORITY and therefore never be delayed by the RTOS kernel execution.
For example, imagine a hypothetical microcontroller that has 8 interrupt priority levels - 0 being the lowest and 7 being the highest (see the special note for ARM Cortex-M3 users at the end of this section). The picture below describes what can and cannot be done at each priority level should the two configuration constants be set to 4 and 0 as shown:
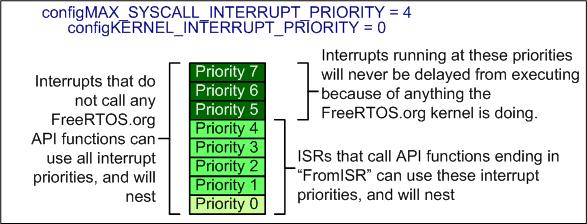
Example interrupt priority configuration
These configuration parameters allow very flexible interrupt handling:
-
Interrupt handling 'tasks' can be written and prioritised as per any other task in the system. These are tasks that are woken
by an interrupt. The interrupt service routine (ISR) itself should be written to be as short as it possibly can be - it just grabs the data then wakes the
high priority handler task. The ISR then returns directly into the woken handler task - so interrupt processing is contiguous in time just as if it were all
done in the ISR itself. The benefit of this is that all interrupts remain enabled while the handler task executes.
-
Ports that implement configMAX_SYSCALL_INTERRUPT_PRIORITY take this further - permitting a fully nested model where interrupts between
the RTOS kernel interrupt priority and configMAX_SYSCALL_INTERRUPT_PRIORITY can nest and make applicable API calls. Interrupts with priority
above configMAX_SYSCALL_INTERRUPT_PRIORITY are never delayed by the RTOS kernel activity.
- ISR's running above the maximum syscall priority are never masked out by the RTOS kernel itself, so their responsiveness is not effected by the RTOS kernel functionality. This is ideal for interrupts that require very high temporal accuracy - for example interrupts that perform motor commutation. However, such ISR's cannot use the FreeRTOS API functions.
A special note for ARM Cortex-M3 and ARM Cortex-M4 users: Please read the page dedicated to interrupt priority settings on ARM Cortex-M devices. As a minimum, remember that ARM Cortex-M3 cores use numerically low priority numbers to represent HIGH priority interrupts, which can seem counter-intuitive and is easy to forget! If you wish to assign an interrupt a low priority do NOT assign it a priority of 0 (or other low numeric value) as this can result in the interrupt actually having the highest priority in the system - and therefore potentially make your system crash if this priority is above configMAX_SYSCALL_INTERRUPT_PRIORITY.
The lowest priority on a ARM Cortex-M3 core is in fact 255 - however different ARM Cortex-M3 vendors implement a different number of priority bits and supply library functions that expect priorities to be specified in different ways. For example, on the STM32 the lowest priority you can specify in an ST driver library call is in fact 15 - and the highest priority you can specify is 0.
configASSERT
The semantics of the configASSERT() macro are the same as the standard C assert() macro. An assertion is triggered if the parameter passed into configASSERT() is zero.configASSERT() is called throughout the FreeRTOS source files to check how the application is using FreeRTOS. It is highly recommended to develop FreeRTOS applications with configASSERT() defined.
The example definition (shown at the top of the file and replicated below) calls vAssertCalled(), passing in the file name and line number of the triggering configASSERT() call (__FILE__ and __LINE__ are standard macros provided by most compilers). This is just for demonstration as vAssertCalled() is not a FreeRTOS function, configASSERT() can be defined to take whatever action the application writer deems appropriate.
It is normal to define configASSERT() in such a way that it will prevent the application from executing any further. This if for two reasons; stopping the application at the point of the assertion allows the cause of the assertion to be debugged, and executing past a triggered assertion will probably result in a crash anyway.
Note defining configASSERT() will increase both the application code size and execution time. When the application is stable the additional overhead can be removed by simply commenting out the configASSERT() definition in FreeRTOSConfig.h.
/* Define configASSERT() to call vAssertCalled() if the assertion fails. The assertion has failed if the value of the parameter passed into configASSERT() equals zero. */ #define configASSERT( ( x ) ) if( ( x ) == 0 ) vAssertCalled( __FILE__, __LINE__ )
If running FreeRTOS under the control of a debugger, then configASSERT() can be defined to just disable interrupts and sit in a loop, as demonstrated below. That will have the effect of stopping the code on the line that failed the assert test - pausing the debugger will then immediately take you to the offending line so you can see why it failed.
/* Define configASSERT() to disable interrupts and sit in a loop. */
#define configASSERT( ( x ) ) if( ( x ) == 0 ) { taskDISABLE_INTERRUPTS(); for( ;; ); }
configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS
configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS is only used by FreeRTOS MPU.If configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS is set to 1 then the application writer must provide a header file called "application_defined_privileged_functions.h", in which functions the application writer needs to execute in privileged mode can be implemented. Note that, despite having a .h extension, the header file should contain the implementation of the C functions, not just the functions' prototypes.
Functions implemented in "application_defined_privileged_functions.h" must save and restore the processor's privilege state using the prvRaisePrivilege() function and portRESET_PRIVILEGE() macro respectively. For example, if a library provided print function accesses RAM that is outside of the control of the application writer, and therefore cannot be allocated to a memory protected user mode task, then the print function can be encapsulated in a privileged function using the following code:
void MPU_debug_printf( const char *pcMessage )
{
/* State the privilege level of the processor when the function was called. */
BaseType_t xRunningPrivileged = prvRaisePrivilege();
/* Call the library function, which now has access to all RAM. */
debug_printf( pcMessage );
/* Reset the processor privilege level to its original value. */
portRESET_PRIVILEGE( xRunningPrivileged );
}
This technique should only be use during development, and not deployment, as it circumvents the memory protection.
INCLUDE Parameters
The macros starting 'INCLUDE' allow those components of the real time kernel not utilized by your application to be excluded from your build. This ensures the RTOS does not use any more ROM or RAM than necessary for your particular embedded application.
Each macro takes the form ...
To exclude vTaskDelete() from your build use:
NXP tweet showing LPC5500 (ARMv8-M Cortex-M33) running FreeRTOS.
Meet Richard Barry and learn about running FreeRTOS on RISC-V at FOSDEM 2019
Version 10.1.1 of the FreeRTOS kernel is available for immediate download. MIT licensed.
View a recording of the "OTA Update Security and Reliability" webinar, presented by TI and AWS.
FreeRTOS and other embedded software careers at AWS.

![]()




![]()


